Update: Explore how my thesis is evolving into further calibrated forecasting research. here
Title: A Dynamic Hybrid Weather Forecasting Model for Olive Tree Cultivation in Mediterranean Climates
-
Goal: Forecast daily weather in olive-producing regions using machine learning and uncertainty-aware methods
-
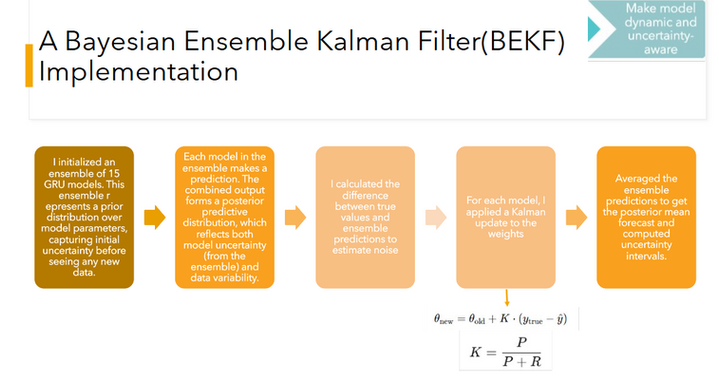
Approach: Combined Gated Recurrent Units with Bayesian Ensemble Kalman Filters for dynamic updates
-
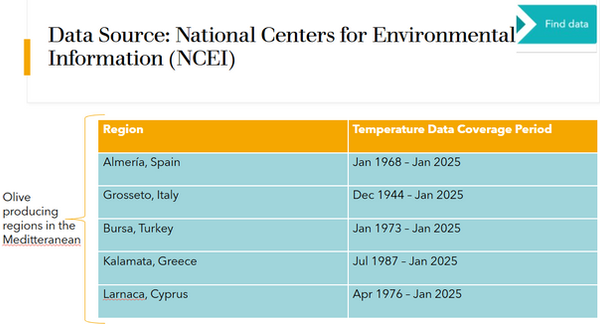
Data: 5 Mediterranean cities (Cyprus, Turkey, Greece, Spain, Italy)
-
Tools: Python, TensorFlow, Prophet, Kalman Filters
Thesis Pdf:

High-Level Steps Overview:




Given a prior belief (my initial model weights) and a new observation (real-time temperature data), how should the model revise it's belief(update its weights) ?

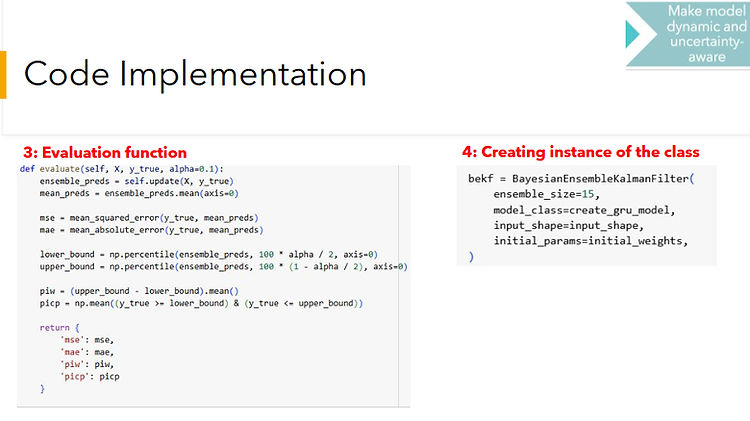
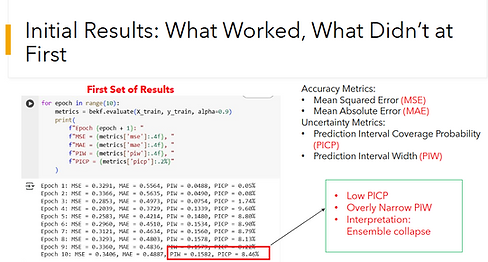



Context: In my thesis I used a Bayesian Ensemble Kalman Filter (BEKF) to produce calibrated predictions, reporting PICP (coverage) and PIW (interval width) alongside error.
Goal: I wanted to carry forward the focus on calibrated uncertainty. After spending some time with the mathematical foundations of Koopman theory, state-space modeling, and robust filtering, I set out to build a more principled and resilient model for a broader dataset and use case.
Methods:
-
Koopman/LRAN backbone. I represent the system in a latent space where the dynamics are approximately linear. Linear evolution is easier to analyze and stabilize, and it naturally captures the diurnal cycle, which helps with generalization.
-
Student-t updates (robust EnKF). Real weather series have outliers and regime shifts. Using a heavy-tailed likelihood makes the filter less brittle than a pure Gaussian assumption.
What changed ?
-
From generic BEKF to a Koopman-guided latent state (LRAN) that encodes periodic structure.
Link to App: https://huggingface.co/spaces/MagretOlad/Thesis_Extension
Link to Github repo: https://github.com/Magret-Oladunjoye/calibrated-weather-lran-enkf
Further Explorations (On-going)